11.1. Introduction
This section presents different calibration methods that are provided to help achieve an accurate estimation of the parameters of a model with respect to data (either from experiment or from simulation). The methods implemented in Uranie are ranging from point estimation to more advanced Bayesian techniques and they mainly differ in the hypotheses they rely on.
They are all gathered in the libCalibration module. The namespace of this library is URANIE::Calibration. Each technique discussed later on is theoretically introduced in [Bla17] along with a general discussion on calibration and particularly on its statistical interpretation.
The reference data will be compared with model predictions, where the model is a mathematical function \(\mathbf{f}_\theta : \mathbb{R}^{n_X} \rightarrow \mathbb{R}^{n_Y}\). From now on and unless otherwise specified the dimension of the output is set to 1 (\(n_Y=1\)) which means that the reference observations and the predictions of the model are scalars (the observations will then be written \(y\) and the predictions of the model \(f_\theta(\mathbf{x})\)).
In addition to the problem-dependent input vector, the model also depends on a parameter vector \(\theta \in \Theta \subset \mathbb{R}^p\) which is constant but unknown. The model is deterministic, meaning that \(f_\theta(\mathbf{x})\) is constant once both \(\mathbf{x}\) and \(\theta\) are fixed. In the rest of this documentation, a given set of parameter values \(\theta\) is called a configuration.
The rest of this section introduces the available distances and likelihoods used to compare observations with model predictions, in Distances and likelihoods used to compare observations and model predictions while the methods are discussed in their own sections. The already predefined calibration methods proposed in the Uranie platform are listed below:
As for other modules, there is a specific class organisation that links the main classes in this
module. The class hierarchy is shown in Figure 11.1 and is
discussed a bit here to explain the two main classes from which all other classes are derived
and the corresponding shared functions used throughout the methods. One can see this organisation with
the two sets of classes: those inheriting from the TCalibration class and those inheriting from
TDistanceLikelihoodFunction class. The former are the different methods that have been developed to calibrate
a model with respect to the observations and each method will be discussed in the upcoming
sections. Whatever the method under consideration, it always includes a distance or a likelihood function object,
which belongs to the latter category and its main job is to quantify how close the model predictions
are to the observations. These objects are discussed in the rest of this introduction, see for
instance Distances and likelihoods used to compare observations and model predictions.
Figure 11.1 Hierarchy of classes and structures out of Doxygen for the Calibration module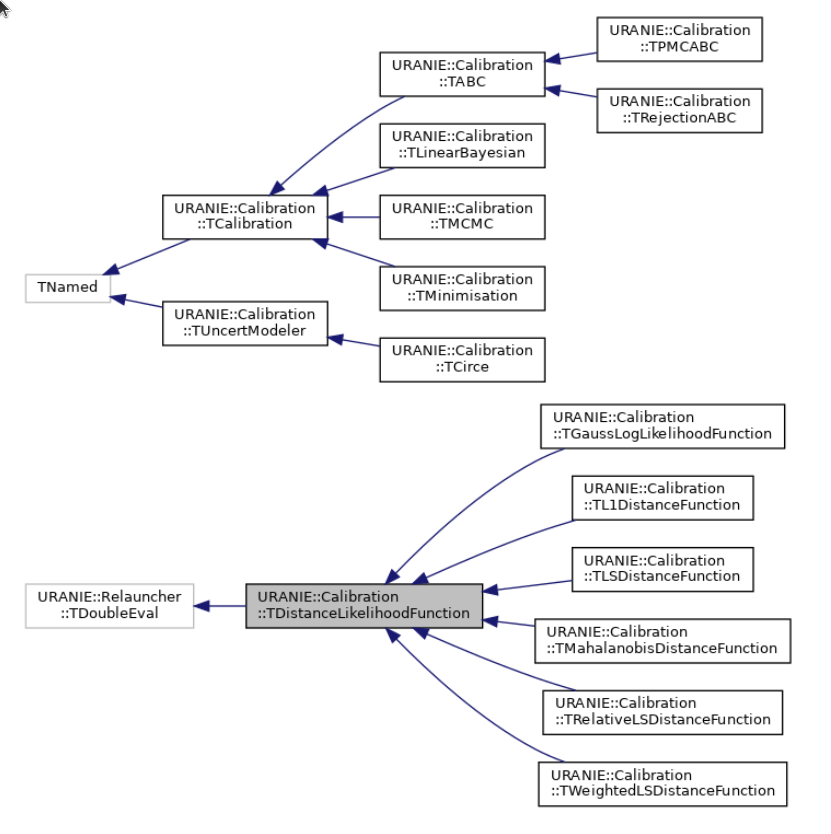
Although CIRCE is not strictly a calibration method, it has been included in this section because it relies on approaches presented here. Indeed, the idea behind this method is to quantify the uncertainty of a given quantity by multiplying it by a Gaussian random variable whose standard deviation must be calibrated. A final section therefore introduces this method.
The next section focuses on the distances and likelihoods already implemented in Uranie, which can be used directly within the calibration methods.