13.10.2. Macro “calibrationMinimisationFlowrate2DVizir.C”
13.10.2.1. Objective
The goal here is to calibrate the parameters \(H_u\) and \(H_l\) within the flowrateCalib2D model
(a two-dimensional version of the flowrate model), while varying only two inputs (\(r_{\omega}\)
and \(L\)). The remaining variables are fixed to the following values: \(r=25050\), \(T_u=89335\),
\(T_l=89.55\), \(K_{\omega}=10950\). The context of this example has already been presented in
Use-case for this chapter, including the model (implemented
here as a C++ function) and the initial lines defining the TDataServer objects.
In addition to what has been presented in Macro “calibrationMinimisationFlowrate1D.C”, this macro introduces two new elements:
the use of Vizir instead of a simpler
TNloptSolver-inheriting instance;the discussion of problem identifiability, as introduced in [Bla17].
13.10.2.2. Macro Uranie
TDataServer *tdsRef = new TDataServer("tdsRef","doe_exp_Re_Pr");
TDataServer *tdsPar = new TDataServer("tdsPar","tdsPar");
// Load the function flowrateCalib2DVizir
gROOT->LoadMacro("UserFunctions.C");
// Input reference file
TString ExpData="Ex2DoE_n100_sd1.75.dat";
// define the reference
tdsRef->fileDataRead(ExpData.Data());
// define the parameters
tdsPar->addAttribute( new TAttribute("hu", 1020.0, 1080.0) );
tdsPar->addAttribute( new TAttribute("hl", 720.0, 780.0) );
// Create the output attribute
TAttribute *out = new TAttribute("out");
// Create interface to assessors
TCIntEval *Model = new TCIntEval("flowrateCalib2D");
Model->addInput(tdsPar->getAttribute("hu"));
Model->addInput(tdsPar->getAttribute("hl"));
Model->addInput(tdsRef->getAttribute("rw"));
Model->addInput(tdsRef->getAttribute("l"));
Model->addOutput(out);
// Set the runner
TSequentialRun *runner = new TSequentialRun(Model);
// Set the calibration object
TMinimisation *cal = new TMinimisation(tdsPar,runner,1);
cal->setDistance("relativeLS",tdsRef,"rw:l","Qexp");
// Set optimisaiton properties
URANIE::Reoptimizer::TVizirGenetic solv;
solv.setSize(24,15000,100);
cal->setOptimProperties(&solv);
// ((URANIE::Reoptimizer::TVizir2*)cal->getOptimMaster()->setTolerance(1e-6);
cal->estimateParameters();
// Draw the residuals
TCanvas *canRes = new TCanvas("CanRes","CanRes",1200,800);
TPad *padRes = new TPad("padRes","padRes",0, 0.03, 1, 1);
padRes->Draw();
padRes->cd();
cal->drawResiduals("Residuals","*","","nonewcanvas");
// Draw the box plot of parameters
TCanvas *canPar = new TCanvas("CanPar","CanPar",1200,800);
tdsPar->getTuple()->SetMarkerStyle(20);
tdsPar->getTuple()->SetMarkerSize(0.8);
tdsPar->Draw("hu:hl");
// Look at the correlation and statistic
tdsPar->computeStatistic("hu:hl");
TMatrixD corr=tdsPar->computeCorrelationMatrix("hu:hl");
corr.Print();
cout<<"hl is "<<tdsPar->getAttribute("hl")->getMean()<<" +- "<<tdsPar->getAttribute("hl")->getStd()<<endl;
cout<<"hu is "<<tdsPar->getAttribute("hu")->getMean()<<" +- "<<tdsPar->getAttribute("hu")->getStd()<<endl;
Much of this code has already been covered in the previous section
Macro “calibrationMinimisationFlowrate1D.C” (up to the sequential run). The main
difference here is that the input parameter is now defined as a TAttribute with boundaries
specifying the space in which the algorithm will search.
tdsPar->addAttribute( new TAttribute("hu", 1020.0, 1080.0) );
tdsPar->addAttribute( new TAttribute("hl", 720.0, 780.0) );
The model is defined (from a TCIntEval instance with the three input variables discussed above,
in the correct order) along with the computation distribution method (sequential).
// Create interface to assessors
TCIntEval *Model = new TCIntEval("flowrateCalib2D");
Model->addInput(tdsPar->getAttribute("hu"));
Model->addInput(tdsPar->getAttribute("hl"));
Model->addInput(tdsRef->getAttribute("rw"));
Model->addInput(tdsRef->getAttribute("l"));
Model->addOutput(out);
// Set the runner
TSequentialRun *runner = new TSequentialRun(Model);
Once this setup is complete, the calibration object (TMinimisation) is created. As explained in
Recommended distance and likelihood functions, construction method, the first step is
to define the distance function (here the relative least squares distance) using setDistance. This method
also specifies the TDataServer containing the reference data, the names of the reference inputs, and the reference
variable against which the model output is compared. Finally, the optimisation algorithm is defined by creating
an instance of TVizirGenetic, and the parameters are then estimated.
// Set the calibration object
TMinimisation *cal = new TMinimisation(tdsPar,runner,1);
cal->setDistance("relativeLS",tdsRef,"rw:l","Qexp");
// Set optimisaiton properties
URANIE::Reoptimizer::TVizirGenetic solv;
solv.setSize(24,15000,100);
cal->setOptimProperties(&solv);
// ((URANIE::Reoptimizer::TVizir2*)cal->getOptimMaster()->setTolerance(1e-6);
cal->estimateParameters();
The final part demonstrates how to display the results. Since this method produces a point estimate, only a
single value is obtained, which is always shown on the screen, as illustrated in
Console. Another important aspect is to examine the residuals,
as discussed in [Bla17]. This is illustrated in Figure 13.61, which
shows the residuals of the a posteriori estimates, typically following a normal
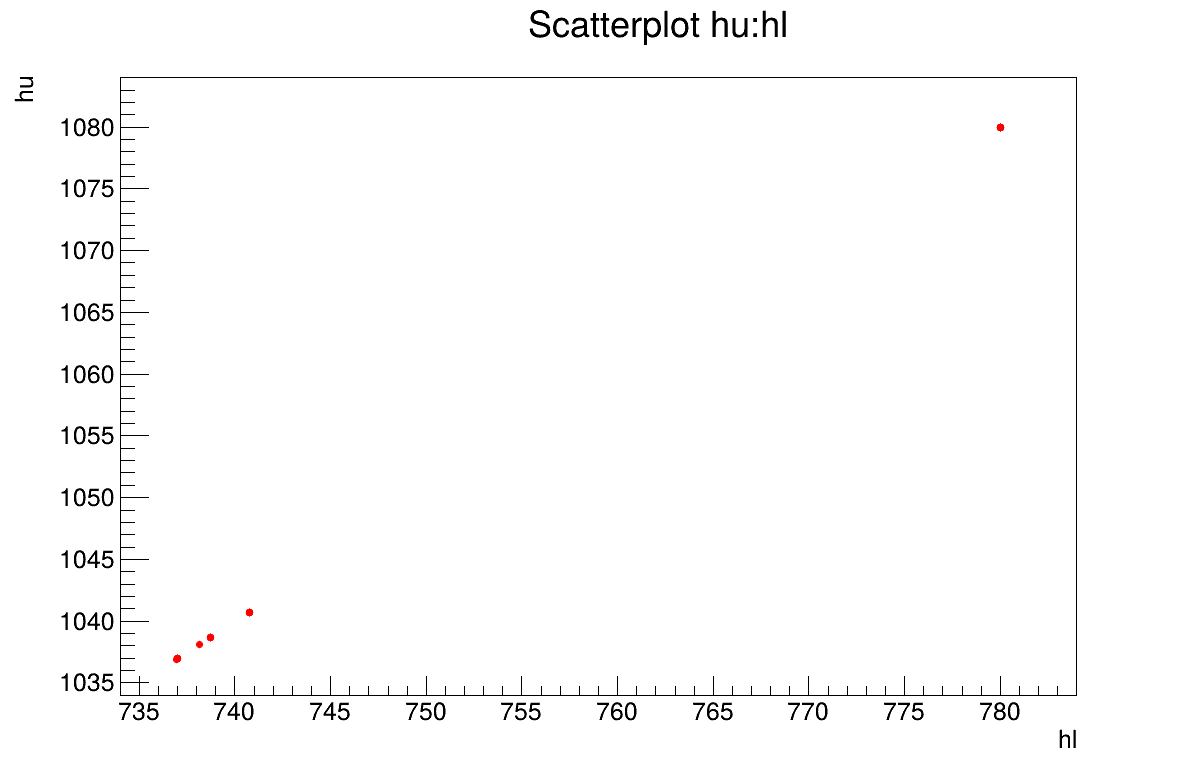
distribution. Finally, the parameter graph (Figure 13.62)
reveals a wide variety of possible solutions. This highlights a problem of identifiability,
since infinitely many parameter combinations can lead to the same results, as further confirmed
by the correlation matrix shown in Console.
// Draw the residuals
TCanvas *canRes = new TCanvas("CanRes","CanRes",1200,800);
TPad *padRes = new TPad("padRes","padRes",0, 0.03, 1, 1);
padRes->Draw();
padRes->cd();
cal->drawResiduals("Residuals","*","","nonewcanvas");
// Draw the box plot of parameters
TCanvas *canPar = new TCanvas("CanPar","CanPar",1200,800);
tdsPar->getTuple()->SetMarkerStyle(20);
tdsPar->getTuple()->SetMarkerSize(0.8);
tdsPar->Draw("hu:hl");
// Look at the correlation and statistic
tdsPar->computeStatistic("hu:hl");
TMatrixD corr=tdsPar->computeCorrelationMatrix("hu:hl");
corr.Print();
cout<<"hl is "<<tdsPar->getAttribute("hl")->getMean()<<" +- "<<tdsPar->getAttribute("hl")->getStd()<<endl;
cout<<"hu is "<<tdsPar->getAttribute("hu")->getMean()<<" +- "<<tdsPar->getAttribute("hu")->getStd()<<endl;
13.10.2.3. Console
--- Uranie v4.11/0 --- Developed with ROOT (6.36.06)
Copyright (C) 2013-2026 CEA/DES
Contact: support-uranie@cea.fr
Date: Thu Feb 12, 2026
first 100
Genetic 1
Generation : 1, rang max 23
Nb d'evaluation : 100, taille de la Z.P. : 0
Generation : 2, rang max 23
Nb d'evaluation : 465, taille de la Z.P. : 1
Generation : 3, rang max 8
Nb d'evaluation : 963, taille de la Z.P. : 6
Generation : 4, rang max 0
Nb d'evaluation : 1617, taille de la Z.P. : 24
Genetic converge 1617
************************************************************************************
* Row * tdsPar__n * hu.hu * hl.hl * agreement * rgpareto. * generatio *
************************************************************************************
* 0 * 0 * 1038.1302 * 738.13383 * 0.3639076 * 0 * 3 *
* 1 * 1 * 1080 * 780 * 0.3639083 * 0 * 3 *
* 2 * 2 * 1040.7058 * 740.77116 * 0.3639018 * 0 * 3 *
* 3 * 3 * 1079.9545 * 780 * 0.3639024 * 0 * 3 *
* 4 * 4 * 1040.7058 * 740.77116 * 0.3639018 * 0 * 1 *
* 5 * 5 * 1038.6638 * 738.70819 * 0.3639025 * 0 * 3 *
* 6 * 6 * 1040.7058 * 740.77116 * 0.3639018 * 0 * 3 *
* 7 * 7 * 1036.9776 * 736.98122 * 0.3639076 * 0 * 3 *
* 8 * 8 * 1036.9776 * 736.98122 * 0.3639076 * 0 * 3 *
* 9 * 9 * 1038.6638 * 738.70819 * 0.3639025 * 0 * 3 *
* 10 * 10 * 1036.9776 * 736.98122 * 0.3639076 * 0 * 2 *
* 11 * 11 * 1080 * 780 * 0.3639083 * 0 * 3 *
* 12 * 12 * 1036.9776 * 736.98122 * 0.3639076 * 0 * 3 *
* 13 * 13 * 1040.7058 * 740.77116 * 0.3639018 * 0 * 2 *
* 14 * 14 * 1080 * 780 * 0.3639083 * 0 * 3 *
* 15 * 15 * 1080 * 780 * 0.3639083 * 0 * 3 *
* 16 * 16 * 1038.6638 * 738.70819 * 0.3639025 * 0 * 3 *
* 17 * 17 * 1040.7058 * 740.77116 * 0.3639018 * 0 * 3 *
* 18 * 18 * 1080 * 780 * 0.3639083 * 0 * 3 *
* 19 * 19 * 1036.9776 * 736.98122 * 0.3639076 * 0 * 3 *
* 20 * 20 * 1036.9042 * 736.96108 * 0.3639019 * 0 * 3 *
* 21 * 21 * 1038.6638 * 738.70819 * 0.3639025 * 0 * 3 *
* 22 * 22 * 1080 * 780 * 0.3639083 * 0 * 3 *
* 23 * 23 * 1080 * 780 * 0.3639083 * 0 * 3 *
************************************************************************************
2x2 matrix is as follows
| 0 | 1 |
-------------------------------
0 | 1 1
1 | 1 1
hl is 752.445 +- 19.9463
hu is 1052.42 +- 19.9598
13.10.2.4. Graphs
Figure 13.61 Residuals graph of the macro “calibrationMinimisationFlowrate2DVizir.C”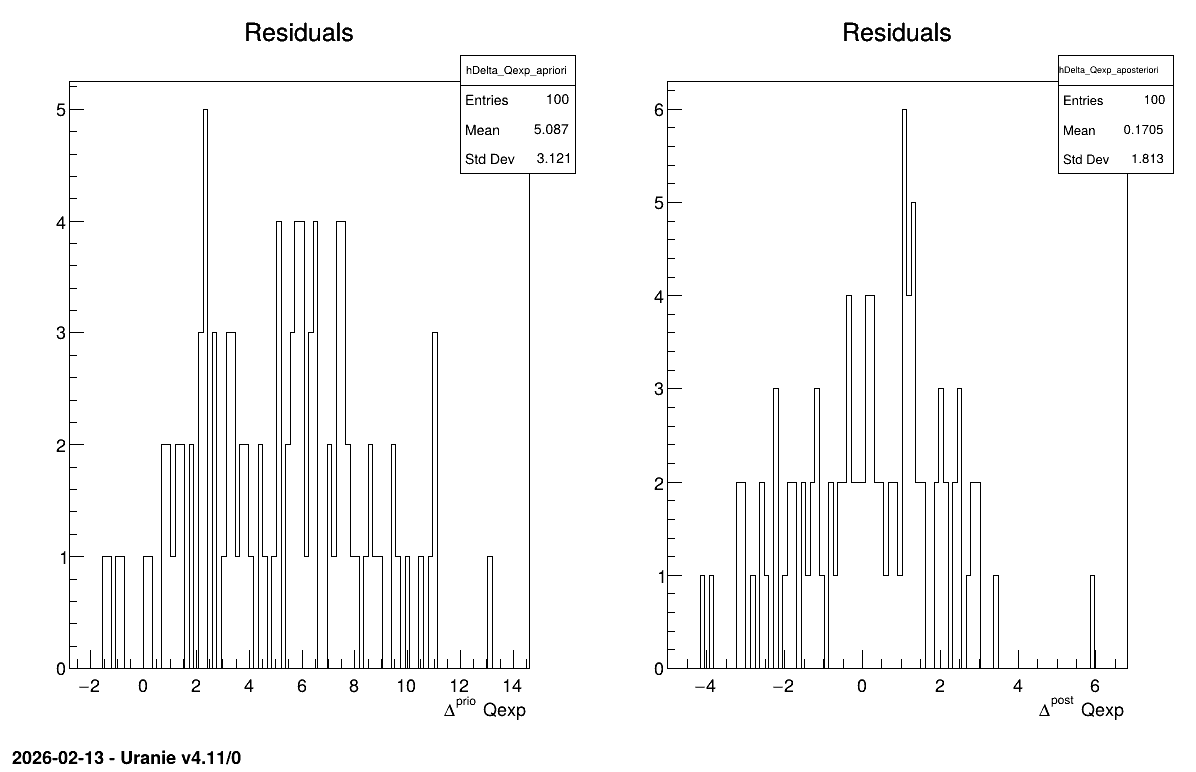
Figure 13.62 Parameter graph of the macro “calibrationMinimisationFlowrate2DVizir.C”