
Documentation
/ User's manual in C++
: 
| III.2. The Stochastic methods | ||
|---|---|---|
 | Chapter III. The Sampler module |  |
The stochastic classes all inherit from the TSampler class through the
TSamplerStochastic one. In these classes the knowledge (or mis-knowledge) of the model is encoded in the choice of probability
law used to describe the inputs  , for
, for  . These laws are usually defined by:
. These laws are usually defined by:
a range that describes the possible values of
the nature of the law, which has to be taken in the list of
TStochasticAttributealready presented in Section II.2.5
A choice has frequently to be made between two implemented methods of drawing:
- SRS (Simple Random Sampling):
This method consists in independently generating the samples for each parameter following its own probability density function. The obtained parameter variance is rather high, meaning that the precision of the estimation is poor leading to a need for many repetitions in order to reach a satisfactory precision. An example of this sampling when having two independent random variables (uniform and normal one) is shown in Figure III.3-left.
- LHS (Latin Hypercube Sampling):
this method [McKay2000] consists in partitioning the interval of each parameter so as to obtain segments of equal probabilities, and afterwards in selecting, for each segment, a value representing this segment. An example of this sampling when having two independent random variables (uniform and normal one) is shown in Figure III.3-right.
Both methods consist in generating a  -sample represented by a matrix
-sample represented by a matrix  called matrix of the design-of-experiments. The number of columns of the matrix
correspond to the number of
uncertain parameters
called matrix of the design-of-experiments. The number of columns of the matrix
correspond to the number of
uncertain parameters  , and the
number of lines is equal to the size of the sample .
, and the
number of lines is equal to the size of the sample .
The first method is fine when the computation time of a simulation is "satisfactory". As a matter of fact, it has the
advantage of being easy to implement and to explain; and it produces estimators with good properties not only for the
mean value but also for the variance. Naturally, it is necessary to be careful in the sense to be given to the term
"satisfactory". If the objective is to obtain quantiles for extreme probability values  (i.e. = 0.99999 for instance), even for a very
low computation time, the size of the sample would be too large for this method to be used. When a computation time
becomes important, the LHS sampling method is preferable to get robust results even with small-size samples
(i.e. = 50 to 200) [Helton02]. On the other hand, it is rather trivial to double the
size of an existing SRS sampling, as no extra caution has to be taken apart from the random seed.
(i.e. = 0.99999 for instance), even for a very
low computation time, the size of the sample would be too large for this method to be used. When a computation time
becomes important, the LHS sampling method is preferable to get robust results even with small-size samples
(i.e. = 50 to 200) [Helton02]. On the other hand, it is rather trivial to double the
size of an existing SRS sampling, as no extra caution has to be taken apart from the random seed.
In Figure III.2, we present two samples of size = 8 coming from these two sampling methods for two
random variables  according to
a gaussian law, and
according to
a gaussian law, and  a uniform
law. To make the comparison easier, we have represented on both figures the partition grid of equiprobable segments
of the LHS method, keeping in mind that it is not used by the SRS method. These figures clearly show that for LHS
method each variable is represented on the whole domain of variation, which is not the case for the SRS method. This
latter gives samples that are concentrated around the mean vector; the extremes of distribution being, by definition,
rare.
a uniform
law. To make the comparison easier, we have represented on both figures the partition grid of equiprobable segments
of the LHS method, keeping in mind that it is not used by the SRS method. These figures clearly show that for LHS
method each variable is represented on the whole domain of variation, which is not the case for the SRS method. This
latter gives samples that are concentrated around the mean vector; the extremes of distribution being, by definition,
rare.
Concerning the LHS method (right figure), once a point has been chosen in a segment of the first variable , no other point of this segment will be picked
up later, which is hinted by the vertical red bar. It is the same thing for all other variables, and this process is
repeated until the
points are obtained. This elementary principle will ensure that the domain of variation of each variable is totally
covered in a homogeneous way. On the other hand, it is absolutely not possible to remove or add points to a LHS
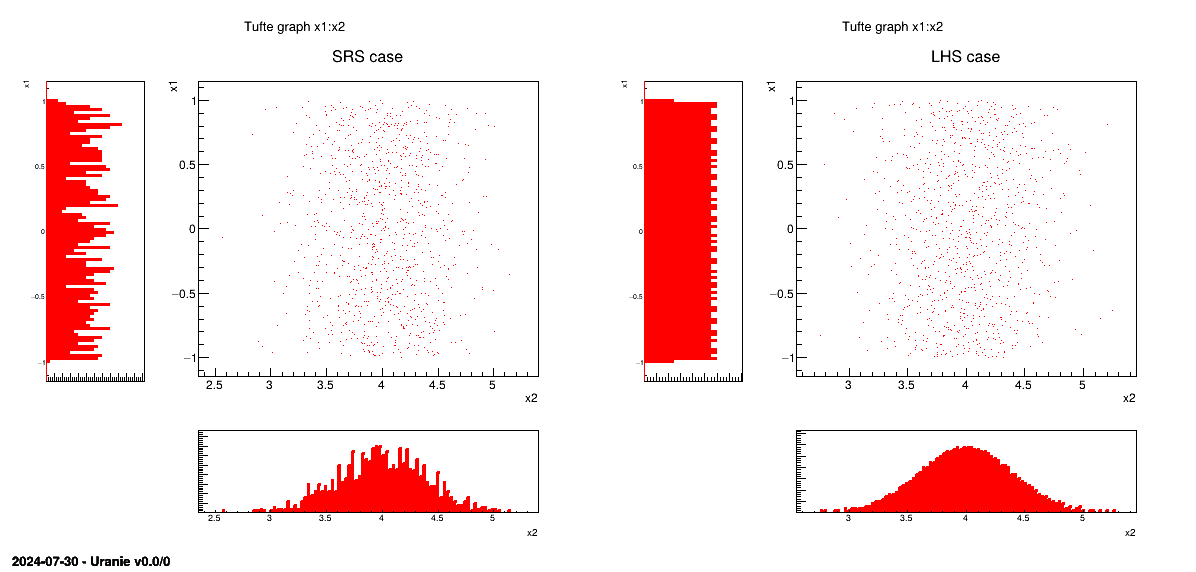
sampling without having to regenerate it completely. A more realistic picture is draw in Figure III.3 with the same laws, both for SRS on the left and LHS on the right. The "tufte" representation (presented in Section II.5.6) clearly shows the
difference between both methods when considering one-dimensional distribution.
Figure III.2. Comparison of the two sampling methods SRS (left) and LHS (right) with samples of size 8.
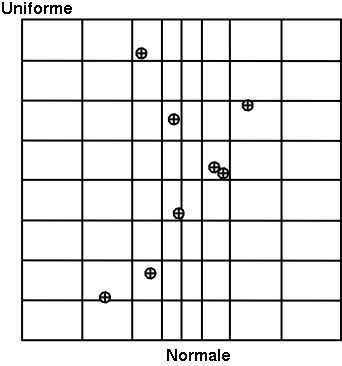
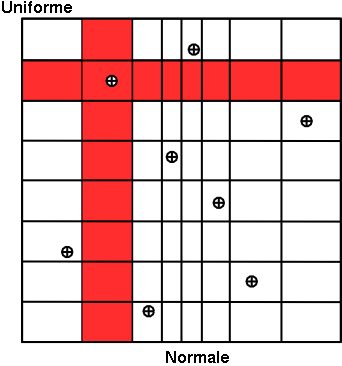
Figure III.3. Comparison of deterministic design-of-experiments obtained using either SRS (left) or LHS (right) algorithm, when having two independent random variables (uniform and normal one)
 |
There are two different sub-categories of LHS design-of-experiments discussed here and whose goal might slightly differs from the main LHS design discussed above:
the maximin LHS: this category is the result of an optimisation whose purpose is to maximise the minimal distance between any sets of two locations. This is discussed later-on in Section III.2.2.
the constrained LHS: this category is defined by the fact that someone wants to have a design-of-experiments fulfilling all properties of a Latin Hypercube Design but adding one or more constraints on the input space definition (generally inducing correlation between varibles). This is also further discussed in Section III.2.2 and in Section III.2.4.
Once the nature of the law is chosen, along with a variation range, for all inputs , the correlation between these variables has to be taken
into account. This is further discussed in Section III.3
The sampler classes are built with the same skeleton. They consist in a three steps procedure:
init, generateSample and terminate. There
are five different types of Stochastic sampler that can be used:
TSampling: general sampler where the sampling is done with the Iman and Conover methods ([Iman82]) that uses a double Cholesky decomposition in order to respect the requested correlation matrix. This methods has the drawback of asking a number of samples at least twice as large as the number of attribute.TBasicSampling: very simple implementation of the random sampling that can, as well, produce stratified sampling. As it is fairly simple, there is no lower limit in the number of random samples that can be generated and generation is much faster when dealing with a large number of attributes than with theTSampling. On the other hand, even though a correlation can be imposed between the variables, it will be done in a simple way that cannot by construction respect the stratified aspect (if requested, see [metho] explanations).TMaxiMinLHS: class recently introduced to produced maximin LHS, whose purpose is to get the best coverage of the input space (for a deeper discussion on the motivation, see [metho]). It can be used with a provided LHS drawing or it can start from scratch (using theTSamplingclass to get the starting point). The result of this procedure can be seen in Figure XIV.13 which was procuded with the macro introduced in Section XIV.3.11;Tip
The optimisation to get a maximin LHS is done on the mindist criterion: let
 be a design-of-experiments with
be a design-of-experiments with  points. The mindist criterion is written as:
points. The mindist criterion is written as:
 where
where  is the euclidian norm.
is the euclidian norm.
This information can be computed on any grid, by calling the static function
double mindist = TMaxiMinLHS::getMinDist(TMatrixD LHSgrid);TConstrLHS: class recently introduced to produced constrained LHS, whose purpose is to get nicely covered marginal laws while respecting one or more constraints imposed by the user. It can be used with a provided LHS drawing or it can start from scratch (using theTSamplingclass to get the starting point) and it is discussed a bit further in Section III.2.4. The result of this procedure can be seen in Figure XIV.14 which was procuded with the macro introduced in Section XIV.3.12;TGaussianSampling: very basic sampler specially done for cases composed with only normal distributions. It relies on the drawing of a sample
 being the number of sample and the number of inputs. The sample is transformed to account for correlation (see [metho]) and
shifted by the requested mean (for every variables).
being the number of sample and the number of inputs. The sample is transformed to account for correlation (see [metho]) and
shifted by the requested mean (for every variables).
TImportanceSampling: use the same method asTSamplingbut should be used when oneTAttributehas a son. In this case the range for the considered attribute is the sub-range used to define the son and there is specific reweighting procedure to take into account the fact that the authorised range is reduced. LHS is therefore used by default.
The following piece shows how to generate a sample using the TSampling class.
TUniformDistribution *xunif = new TUniformDistribution("x1", 3., 4.);  TNormalDistribution *xnorm = new TNormalDistribution("x2", 0.5, 1.5);
TNormalDistribution *xnorm = new TNormalDistribution("x2", 0.5, 1.5);  TDataServer * tds = new TDataServer("tdsSampling", "Demonstration Sampling");
tds->addAttribute(xunif);
tds->addAttribute(xnorm);
// Generate the sampling from the TDataServer object
TSampling *sampling = new TSampling(tds, "lhs", 1000);
TDataServer * tds = new TDataServer("tdsSampling", "Demonstration Sampling");
tds->addAttribute(xunif);
tds->addAttribute(xnorm);
// Generate the sampling from the TDataServer object
TSampling *sampling = new TSampling(tds, "lhs", 1000);  sampling->generateSample();
sampling->generateSample();  tds->drawTufte("x2:x1");
tds->drawTufte("x2:x1"); 
Generation of a design-of-experiments with stochastic attributes
Generating a uniform random variable in [3., 4.] | |
Generating a gaussian random variable with a mean of 0.5 and a standard deviation of 1.5 | |
Construct the sampler object requesting a sample of 1000 events, using the Lhs algorithm. | |
Method to generate the sample. | |
Draw the plot as the right side of Figure III.3 |
This section will discuss the way to produce a constrained LHS design-of-experiments from scratch, focusing on the main problematic
part: defining one or more constraints and on which variable to apply them. The logic behind the heuristic is
supposed to be known, so if it's not the case, please have a look at the dedicated section in [metho]. This section
will mostly rely on the way to define the constraints and the variables on which these should be applied on which are
specified by the method addConstraint. This methods takes 4 arguments:
a pointer to the function that will compute the constraints values;
the number of constraint defined in the function discussed above;
the number of parameters that are provided to the function discussed above;
the values of the parameters that are provided to the function discussed above;
The main object is indeed the constraint function and the way it is defined is discussed here. It is a C++ function (for convenience as the platform is C++-coded) but this should not be an issue even for python users. The followings lines are showing the example of the constraint function used to produce the plot in Section XIV.3.12.
void Linear(double *p, double *y)
{
double p1=p[0], p2=p[1];
double p3=p[2], p4=p[3];
// Linear constaint
y[0] = (( (p1 + p2>=2.5) || (p1-p2<=0) ) ? 0 : 1);
y[1] = ((p3 - p4<0) ? 0 : 1);
}
Here are few elements to discuss and explain this function:
its prototype is the usual C++-ROOT one with a pointer to the input parameter
pand a pointer to the output (here the constraint results)y;the first lines are defining the parameters, meaning the couples
 for all the constraints. By convention,
the first element of every line (
for all the constraints. By convention,
the first element of every line ( and
and  )
are of the row type (they will not change in the design-of-experiments through this constraint, see [metho] for clarification)
while the second parameters (
)
are of the row type (they will not change in the design-of-experiments through this constraint, see [metho] for clarification)
while the second parameters ( and
and  )
are of the column type, meaning their order in the design-of-experiments will change through permutations through this
constraint.
)
are of the column type, meaning their order in the design-of-experiments will change through permutations through this
constraint.
the rest of the lines are showing the way to compute the constraints and to interpret them thanks to the trilinear operator (even though the classical
if,elsewould perfectly do the trick as well. Let's focus first on the second constraint:y[1] = ((p3 - p4<0) ? 0 : 1);if
p3is lower thanp4(p3-p4<0) then the function will put 0 iny[1](stating that this configuration is not fulfilling the constraint), and it will put 1 otherwise (stating that the constraint is fulfilled). The other line is defining another constraint which is composed of two tests on the same couple of variables:y[0] = (( (p1 + p2>=2.5) || (p1-p2<=0) ) ? 0 : 1);Here, two constraints are combined in once, as they affect the same couple of variables, the configuration will be rejected either if
p1+p2is greater than 2.5 or ifp1is lower thanp2.
Once done, this function needs to be plugged into our code in order to state what variables are p1,
p2, p3 and p4 so that the rest of the procedure discussed in [metho] can be
run. This is done in the addConstraint method, thanks to the third and fourth paramaters
which are taken from a single object: a vector<int> in C++ and a numpy.array in
python. It defines a list of indices (integers) that corresponds to the number of the input attributes as it is has
been added into the TDataServer object. For instance in our case, the list of input attributes
is "x0:x1:x2" while the constraints are coupling  and
and  respectively. Once translated in term of indices, the constraints are coupling
respectively
respectively. Once translated in term of indices, the constraints are coupling
respectively  and
and
 , so the list of
parameter should reflect this which is shown below:
, so the list of
parameter should reflect this which is shown below:
vector<int> inputs = {1,0,2,1};
constrlhs->addConstraint(Linear, 2, inputs.size(), &inputs[0]);
Warning
The consistency between the function and the list of parameters is up to you and you should keep a carefull watch over it. It is true that an inequality can be written in two ways, as
y[0] = ((p[0] - p[1]<0) ? 0 : 1); which would results in the exact
opposite behaviour (and might make the heuristic crash if the constraint cannot be fulfilled).
which would results in the exact
opposite behaviour (and might make the heuristic crash if the constraint cannot be fulfilled).
| |  | |
| Chapter III. The Sampler module |  | III.3. Description of a correlation |